I’m building a robot by using the Beagleboard-xm as a control unit running software for high-level functionalities such as:
- Artificial intelligence
- Image and video processing
- Wireless connectivity
- USB/Serial communication
On the other hand, Arduino implements low-level functions such as:
- Motor control
- Sensor interface
Here are the first pictures:














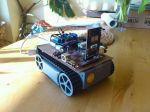



Details coming soon …

This project is awsome. Great work. Thank you for your help with the camera driver. It worked. However I am having issue with the camera speed. I am able to get only 4 frames / sec. However I am able to get 30 frames using an external USB camera. Are you having the same issue? Just wanted to know if I should be using a USB camera instead.
Hi,
Thanks for the comment, I’m also facing some latency due to the fact that jpeg compression is done by the host cpu.
I’ve just learned from another comment on this blog that most of the USB cameras are delivering mjpeg out of the box ->So it’s more conveniant.
The other possibility would be to use the DSP+ gstreamer.
hey whats going on with the motor connection in pictures 4 and 5 ? I get the capacitros but what are they connected to? those leads are strange looking.