I’m building a robot by using the Beagleboard-xm as a control unit running software for high-level functionalities such as:
- Artificial intelligence
- Image and video processing
- Wireless connectivity
- USB/Serial communication
On the other hand, Arduino implements low-level functions such as:
- Motor control
- Sensor interface
Here are the first pictures:














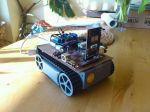



Details coming soon …
